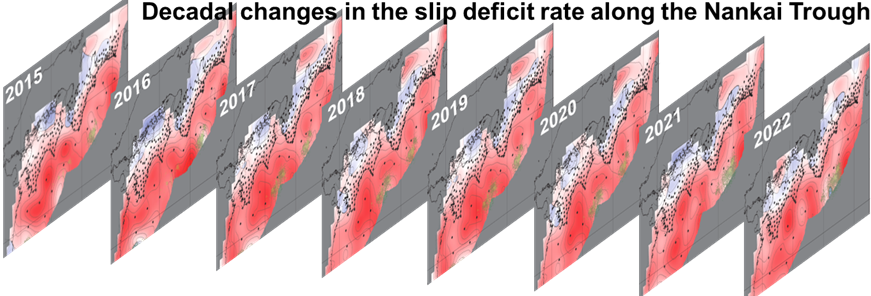
SGO-A(注1)の観測データを分析すると南海トラフのすべり欠損・応力分布を調査できます。この論文では、11年間の長期海底地殻変動データからその間、常に陸域近傍の海底下プレート境界は固着しており、その沖合は弱まる時期があったことを初めて示しました。この沖合の固着域の変化はこれまで、スロー地震と呼ばれるゆっくりとした地震活動と同期すると考えられていましたが、今回の結果は必ずしもスロー地震がない範囲でも固着変化が見られており、地質的な影響や観測限界の問題など今後検討すべき課題を示しました。今後は、さらに拡張されたSGO-A観測網のデータが蓄積されることでさらに浅部側の未知の領域の状態を分析できるようになると期待されています。
SLR(注1: 衛星レーザー測距)は世界中で地球重心、衛星軌道や観測局位置を決定することで宇宙空間利用と国土管理を行う古典的な宇宙測地技術の一つです。観測局の建造に数億円、10年間の運用で同等の金額が必要であり、GNSSに比べて高コストである点がボトルネックとなっています。ドイツではmini-SLRという新技術が開発されていますが、今回、日本ではさらに小型・安価な技術Omni-SLRを新規に開発しました。この技術は、一部の機関で実装に向けて動き出しており、今後のSLR技術の大きなブレイクスルーとなることが期待されています。Omni-SLRはSLR以外にも光による時刻比較など、光分野への応用の可能性も開拓されています。
UAV(ドローン)でAUV(水中無人機)を水中に投入する動作は陸での運搬作業や農薬散布作業と深刻な差異はありませんが、回収動作では水中の揺らぎの影響で陸での動作と決定的に異なります。この論文は、AUVからUAVに自律的に接近動作させることでUAVでのAUV回収動作を実現しようとする基礎技術の検証を行っています。UAV-AUVは今後のUXV(無人機の連携)において重要な役割を果たします。
Omni-SLRという小型の衛星レーザー測距技術の開発についてIAG Scientific Assembly 2025で研究発表しました。


GNSS-A観測(注1)の精度はGNSS観測、海中音響測距のみならず多様な機器間バイアスを含む複雑な誤差の影響を受けます。過去にもいくつかの数値的な検証が行われています。この論文では、その中でも、GNSS誤差や基本的な測線差に依存したシステム誤差を数値的に検証するために、新たにGARPOSと呼ばれるGNSS-A観測ソフトウェアと連動した数値シミュレーション手法を構築し、誤差を評価しました。今後、様々なケースの誤差の尤もらしい評価を実現していくための基礎的な研究です。
GNSS-A観測(注1)は海洋中の擾乱の影響が大きく、その影響の軽減が課題となっています。この論文では海洋内部潮汐のM2分潮の周期の影響がGNSS-A観測では顕著であり、その除去が重要であることを示しています。また、解析によって副次的に内部潮汐の波の向き、影響の大きさ、空間周期も取り出すことができ、海洋学的な解釈が可能であることを述べています。GNSS-Aの海洋学的な応用、GNSS-A海洋学に向けた発見であるとともに、GNSS-A観測の解析精度の向上に向けた基礎的な知見となりました。

南海トラフの海底ケーブル地震観測網DONET(注1)は緊急地震速報や津波の予測に用いられています。この海底地震計には、別途、地震計に付随する形で温度計が設置されており、海底付近の温度を計測しています。本研究では、長期間の海底温度データを調査したところ、南海トラフに沿って、100km以上の領域にわたって同期して変動する海洋波(図)を初めて検出しました。海洋学的には“沿岸捕捉波(Coastal Trapped Wave; CTW)”(注2)の可能性があり、海底地震観測網が新たな海洋学的な観測の可能性を示した珍しい観測事例です。温度変化は非常に小さく、海底圧力計(注3)などでは検知できないレベルの現象であり、南海トラフの地震観測やスロースリップ(注4)の観測には影響を与えない規模の信号です。将来、より高精度のスロースリップ検出などが実施される場合にはノイズとなる可能性があります。
南海トラフの海底ケーブル地震観測網DONET(注1)は緊急地震速報や津波の予測に用いられています。この海底地震計には、別途、地震計に付随する形で温度計が設置されており、海底付近の温度を計測しています。本研究では、長期間の海底温度データを調査したところ、南海トラフに沿って、100km以上の領域にわたって同期して変動する海洋波(図)を初めて検出しました。海洋学的には“沿岸捕捉波(Coastal Trapped Wave; CTW)”(注2)の可能性があり、海底地震観測網が新たな海洋学的な観測の可能性を示した珍しい観測事例です。温度変化は非常に小さく、海底圧力計(注3)などでは検知できないレベルの現象であり、南海トラフの地震観測やスロースリップ(注4)の観測には影響を与えない規模の信号です。将来、より高精度のスロースリップ検出などが実施される場合にはノイズとなる可能性があります。

図: (a),(c)は海底温度が同期しているが(b),(d)は同期していない。これらは距離ではなく、深さが近いかどうかに依存する。
地震学や地質学における海洋音響通信による海底の地形や位置の把握、生物学・海洋学・火山学における海水サンプルの取得、深海洋ロボットの投入と回収など、観測装置を用いた海洋・海底計測には、船舶やブイが用いられます。しかし、船舶にはコスト(大型船舶の場合、100万円/日以上の燃料・人工費がかかる)や機動性(一般的な船舶の場合、20km/h程度)の点に課題があること、ブイには海面位置の保持能力に限界があることが、多くの海洋・海底計測の頻度向上においてボトルネックとなっています。特に、近年は南海トラフなどプレート境界で発生する地震のメカニズム解明および地震災害対策のため、海底の微小な地殻変動を高頻度かつ高精度に計測することが求められています。2022年には、東京大学 生産技術研究所の横田 裕輔 准教授、株式会社ハマは共同で、海面に着水しているUAVによる深海底の観測を行うことに成功しました。本知見をもとに、今回、GNSSアンテナ、音響ソナーをはじめとする各種機器と解析の高精度解析手法を確立し、UAVによるセンチメートルレベルの高精度な海底位置計測技術を実現しています。

横田がJICAの課題別研修の講師を行いました。
